Integrating Runtime Verification into an
Automated UAS Traffic Management System
Matthew Cauwels, Abigail Hammer, Benjamin Hertz, Phillip H. Jones, Kristin Y. Rozier
This webpage contains supplementary specifications for "Integrating Runtime Verification into an
Automated UAS Traffic Management System" by M. Cauwels, A. Hammer, B. Hertz, P. H. Jones, and K. Y. Rozier
OR_UAS_5
Specification Description
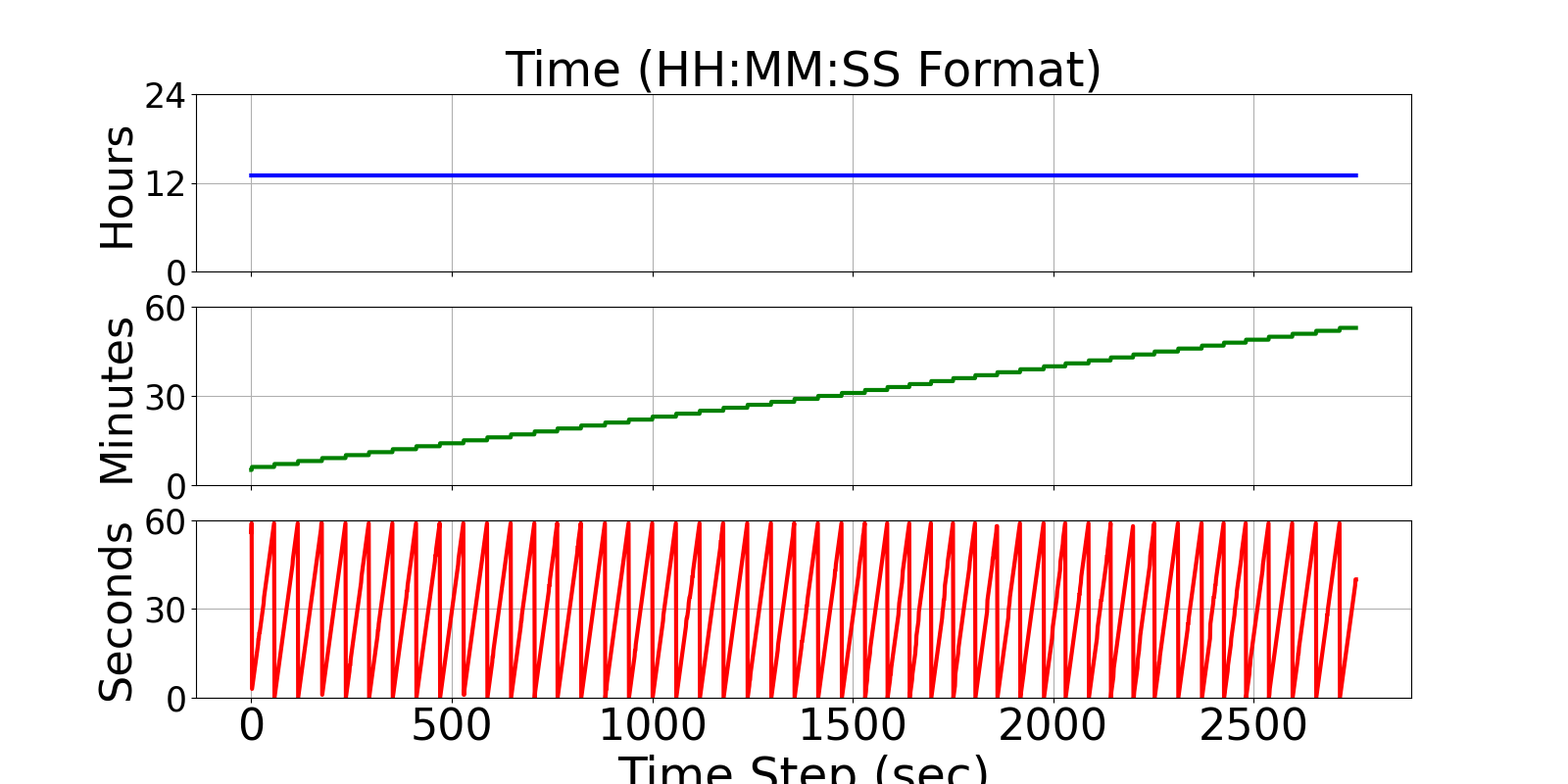
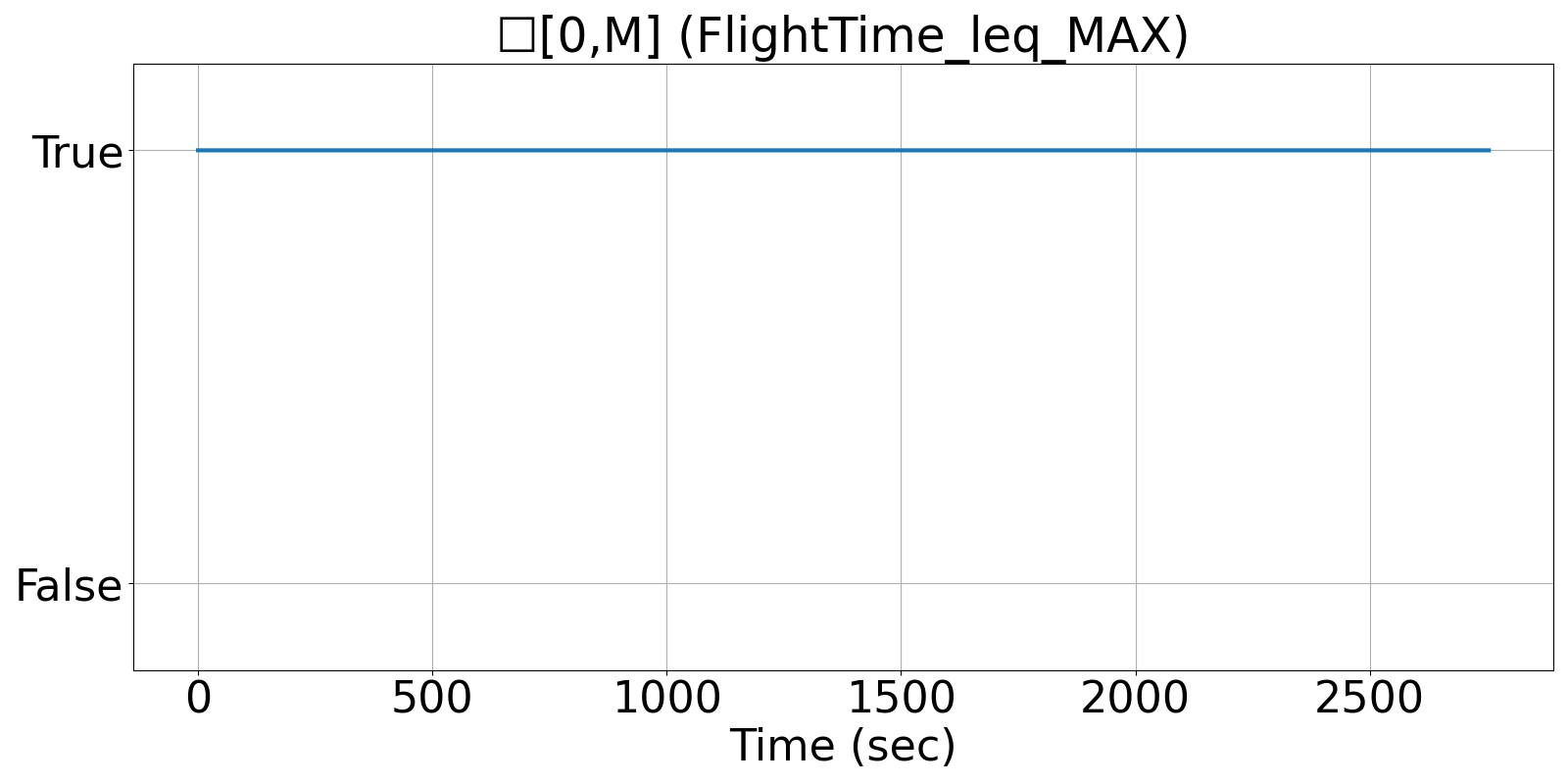
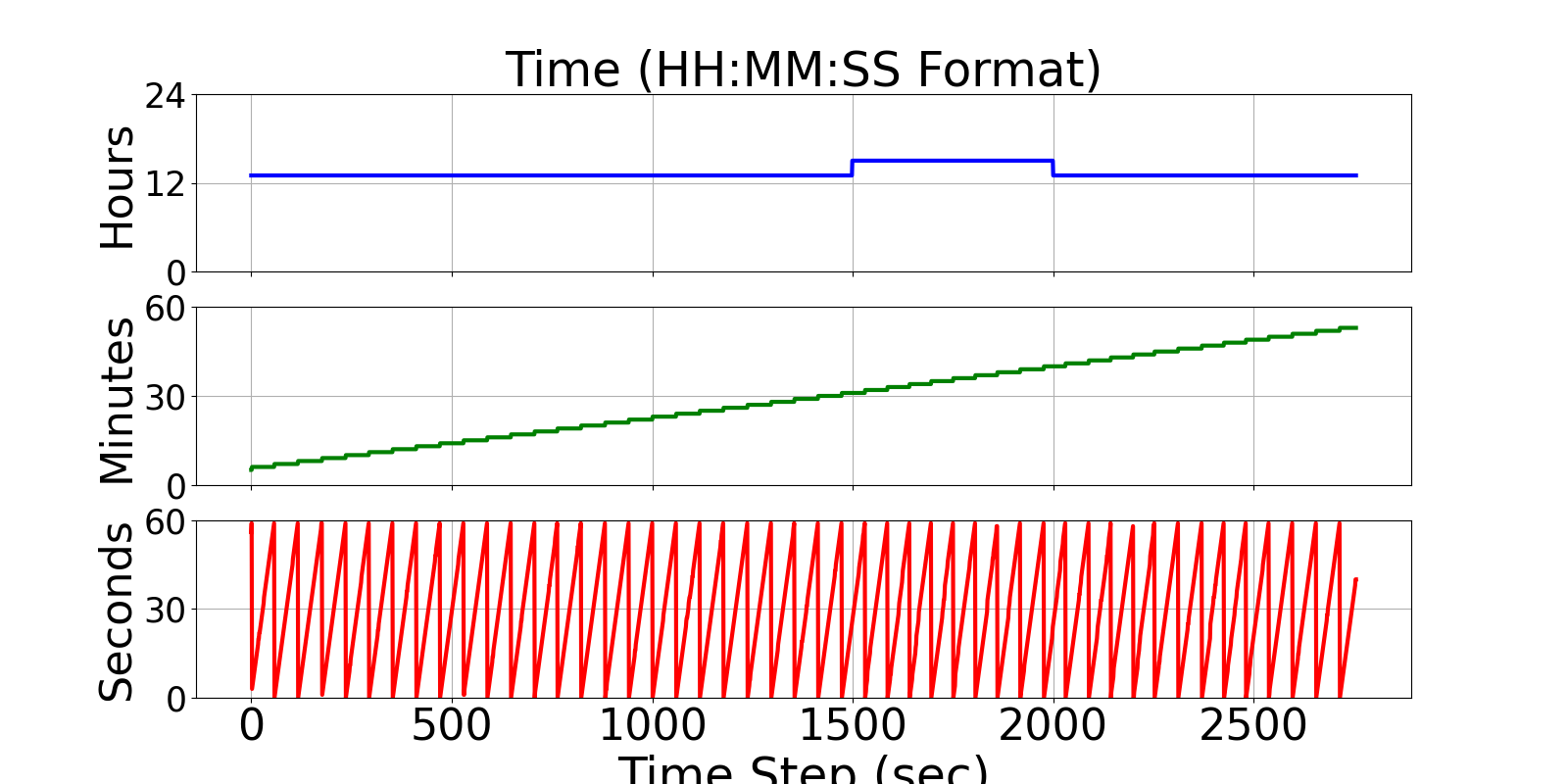
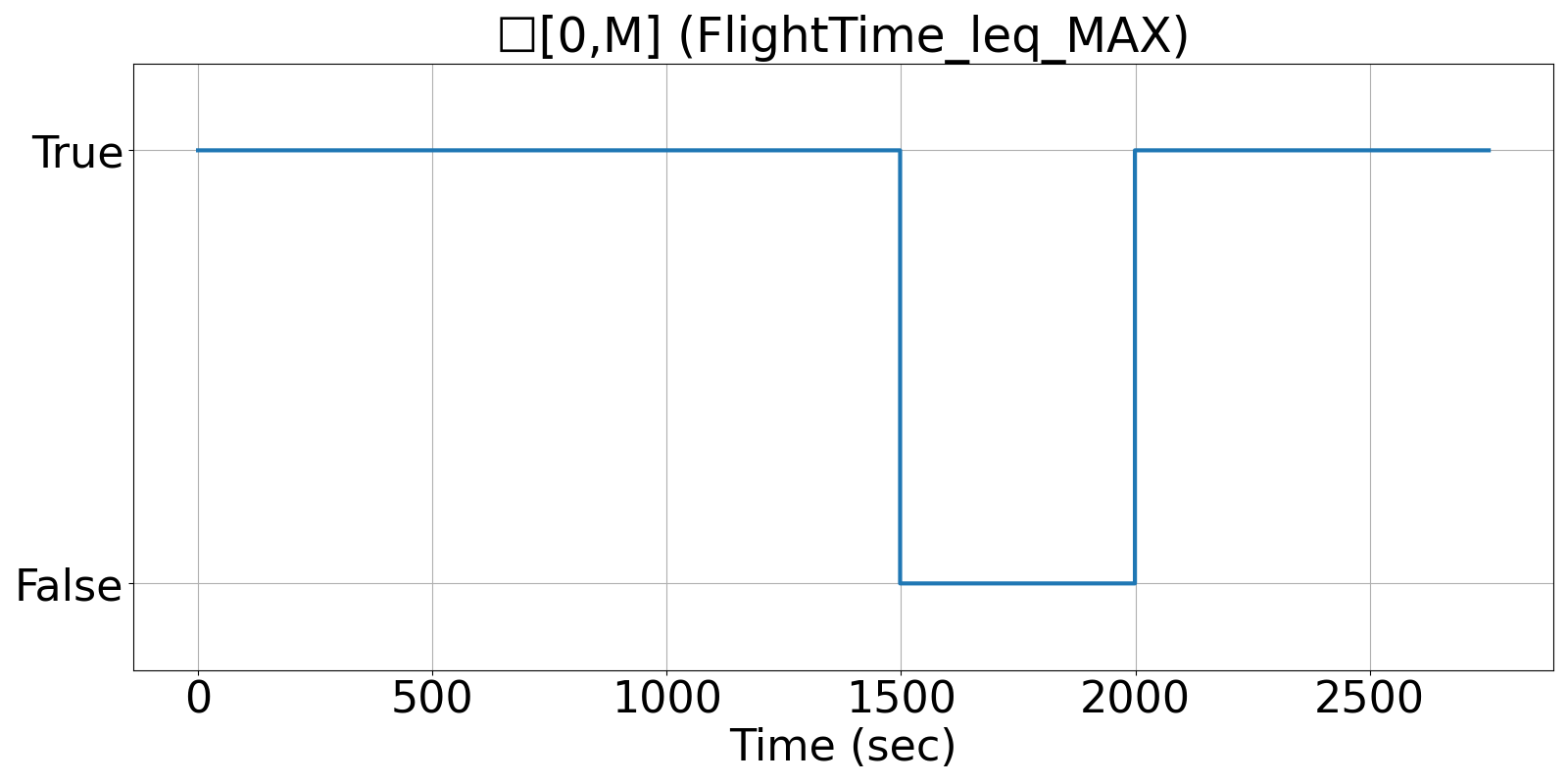
The flight time will be bounded by FT_OR_MAX at all instances.
Signals Required
Time
Boolean Conversion of Signals to Atomic Inputs
FlightTime = Time - StartTime
FlightTime_leq_MAX: FlightTime ≤ FT_OR_MAXMLTL Specification
☐[0,M] (FlightTime_leq_MAX)
Fault Explanation
FlightTime is exceeding maximum possible flighttime
Additional Notes
FT_OR_MAX based on maximum flight time while hovering in the air in ideal conditions (~2 hours)
Figures